
复杂环境条件下盾构隧道智能掘进关键技术
华东交通大学
铁路盾构隧道区间距离长、穿越深度大、开挖直径大、地层变异性大、下穿敏感建构筑物多等建设环境复杂,盾构刀具易磨损破坏、开挖面稳定控制难、微扰动控制要求高,盾构机刀具的合理配置和及时更换、掘进参数的协同匹配动态调控、盾构施工设备智能控制至关重要。本项目针对上述难题开展了系统深入研究。
一、主要科技创新
构建了盾构施工关键参数之间的耦合作用机制及其协同匹配关系,提出了复杂环境条件下盾构掘进参数智能决策方法。建立了基于不同磨损机制的盾构刀具磨损计算方法,构建了考虑刀具运动轨迹和掘进距离的刀具磨损量动态预测模型;构建了不同地层条件下盾构掘进速度与主要掘进参数之间的相关关系,揭示了盾构掘进主要掘进参数之间的耦合作用机制;构建了复杂环境条件下螺旋输送机转速、盾构机顶推速度、顶推力等盾构掘进参数之间的协同匹配关系。
揭示了盾构施工对地层的扰动影响机理,研发了复杂环境条件下盾构掘进参数智能控制成套技术。提出了大直径开挖条件下开挖面极限支护压力确定方法,发明了渣土输出质量实时监控装置和技术,实现了对土舱饱满度和开挖面支护压力的精准智能控制;提出了曲线段盾构机通过模式及超挖控制技术,建立了曲线段盾构机顶推行程差与超挖量计算模型,实现了盾构姿态的精准控制;发明了同步注浆材料流动阻力测试装置,实现了注浆材料流动性能的定量化测定,提出了考虑注浆管道流动阻力的盾构施工同步注浆压力动态调控技术。
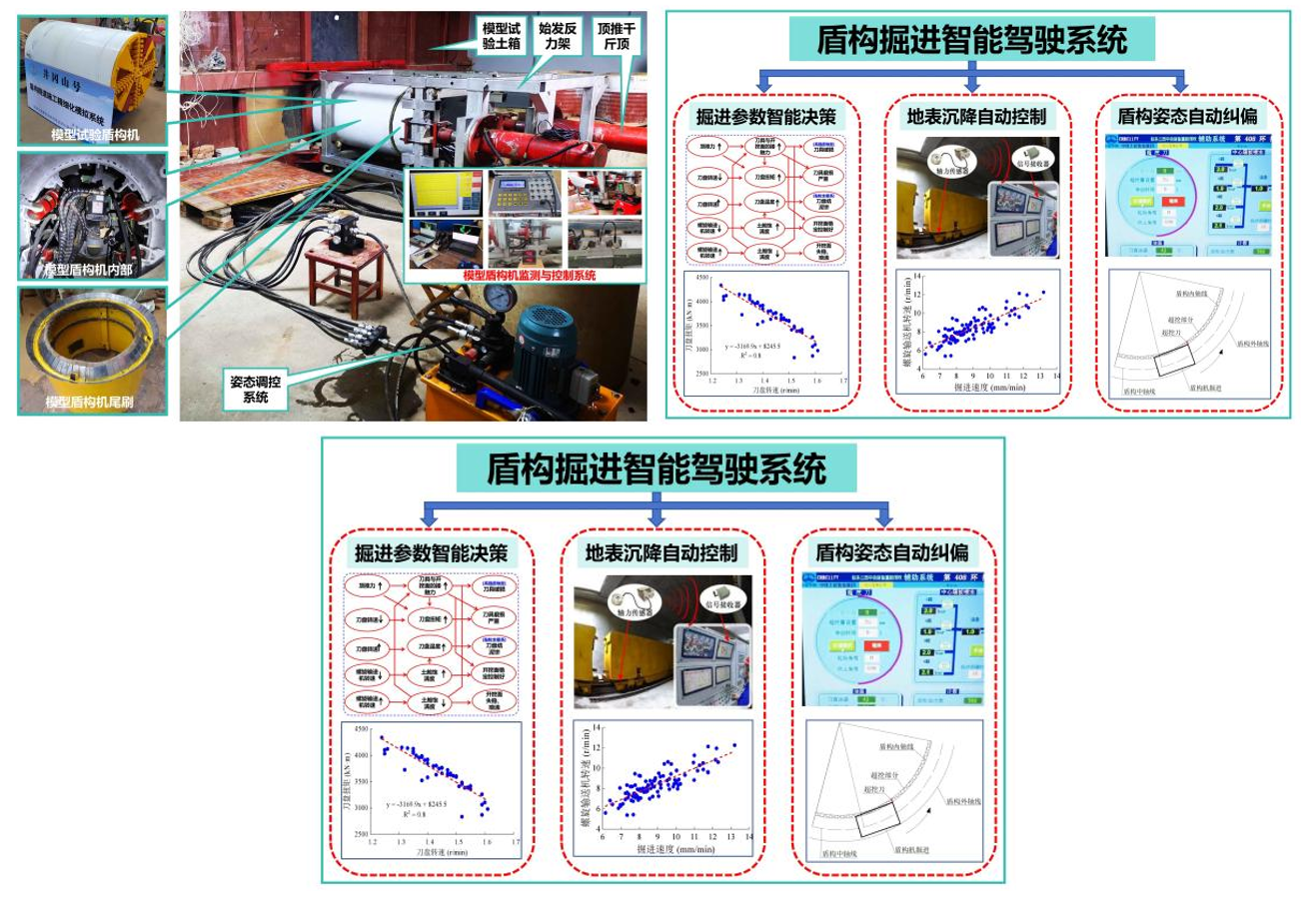
研制了盾构掘进关键参数智能感知终端,开发了复杂环境条件下盾构隧道智能掘进驾驶与控制系统。研制了刀盘刀具状态监测、盾尾间隙测量、渣土体积与重量监测、壁后注浆质量监测及盾构机状态等智能感知终端,构建设备状态感知体系,解决了设备状态实时感知难题;结合自动监测、大数据分析和人工智能算法,开发了盾构掘进智能驾驶系统,实现了地表沉降自动控制、姿态自动纠偏和掘进参数智能决策等;研发了集智能感知、自动驾驶、地面操控中心、管片智能辅助拼装系统、智能水平运输系统等于一体的人机协同智能盾构机自主掘进系统。
二、项目评价
项目研究成果解决了复杂环境条件下盾构刀具磨损预测难、掘进参数耦合机制和协同匹配关系不明、盾构掘进智能化程度低等重难点问题,最终形成了复杂环境条件下盾构隧道智能掘进关键技术,成果对推动我国交通基础设施智能高效建设、高质量发展具有重要促进作用。
三、成果及效益
成果在我国多条铁路及城际高铁的盾构隧道施工中应用,同时在我国多个城市的地铁盾构隧道施工中进行了推广应用,盾构隧道掘进控制效果良好,取得了显著的经济、社会和环境效益,应用前景广阔。项目成果授权发明专利48项、获批软件著作权10项、省部级工法16项,出版学术专著3部。